
Thanks to everyone that came to my talk.

Thanks to everyone that came to my talk.
This post is still work in progress. It is the basis of a conference presentation I am planning for NDC2015.
With the ever increasing complexity of software the need to use development practices like TDD is becoming more and more important. Embedded software development presents an extra set of challenges when practicing TDD. Hardware is often still in development, expensive or has limited availability. Deploying to the target device takes a long time. The target device has limited program space and RAM. For these reasons testing of embedded software is often performed manually (if at all).
There are a large number of papers and articles that focus on TDD for systems without the added complexities of working in an embedded environment. We’ve been developing embedded software using TDD (and a variety of other Agile techniques) for the past 6 years. This paper presents some of the patterns and practices that help us deal with some of the extra complications incurred when practicing TDD in an embedded environment. It covers how we keep the feedback from our tests fast while still running tests on the target hardware. How we mock out dependencies and discusses the advantages and disadvantages to the techniques shown.
The standard TDD cycle is shown below
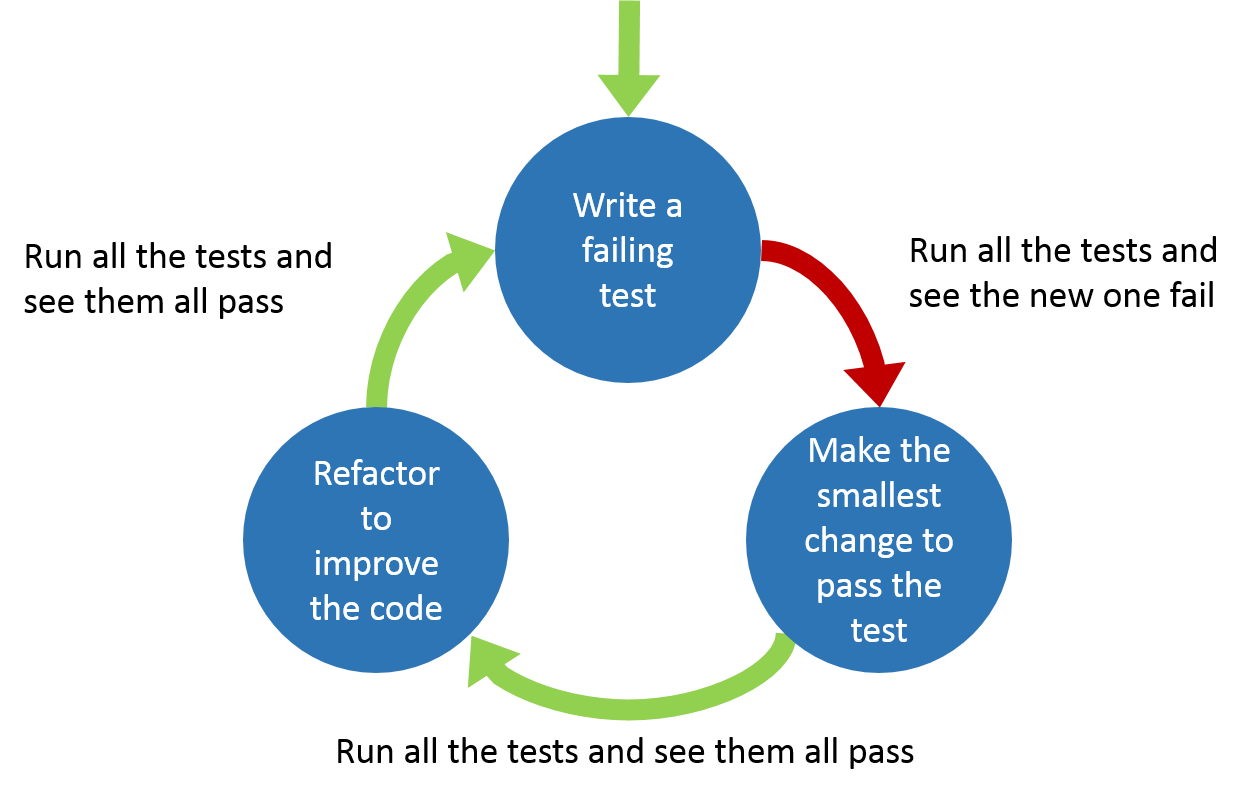
TDD tests should be developed FIRST.
Running tests on the target device is the obvious choice but it’s not without its problems.
Running tests on the development platform solves most (if not all) of the problems encountered with testing on the target platform but introduces some new problems.
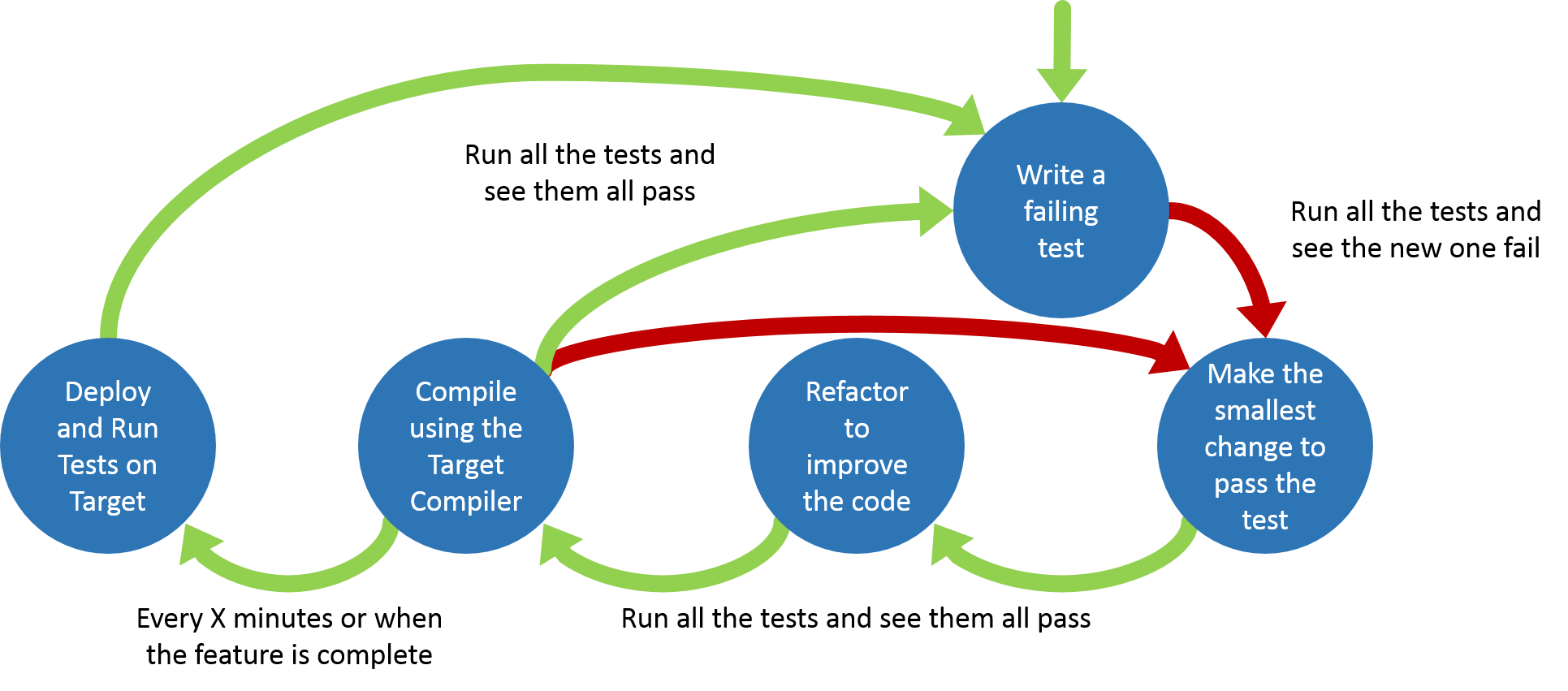
Takes the advantages of both ‘Testing on the Development Platform’ and ‘Testing on the Target Device’ and minimises the disadvantages.
How you split you code up is going to determine how easy or difficult it is to test.
Using these principles will help develop a design which is both low coupled and easily testable.
Don’t add extra methods/function just to facilitate testing, the tests should help develop the interface to the code.
Application code (Hardware independent) [Easier to test]
Hardware Aware Code
PCB Drivers + HAL/BSP
Processor Drivers + HAL [Harder to test]
The further down the layers (closer to the hardware) you test the harder testing gets.
I recently bought some 32×32 Adafruit LED Panels and found there was a lack of detailed information about how to driver the Panels. Although I found some information I’ve had to reverse engineer certain details and this post details what I’ve discovered.
I’ve included links (at the end of the post) to other on-line resources that I found useful while I was developing my driver code.
The panel has a 16 pin input connector, you will need to connect all of the pins to drive the panel.
All the pins are 5 Volt inputs. Throughout this post setting a pin high means it should be taken to 5 Volts, setting a pin low means it should be taken to 0 Volts.
| Pin | Purpose |
|---|---|
| CLK | Serial clock, used for clocking out data to indicates which LEDs should be illuminated |
| R1, G1, B1 | Serial data lines for the top half of the Panel |
| R2, G2, B2 | Serial data lines for the bottom half of the Panel |
| LAT | Latch, latches the previously output serial data to the LED drivers |
| /OE | Output enable, sets if the LEDs are illuminated or not |
| A, B, C, D | Sets the address of row of currently illuminated LEDs |
| All other pins | Ground |
Each panel has a 16 pin output connector, this allows you to daisy chain panels together by connecting the output connector of one panel to the input connector of another panel.
The panel is split into two sections, the top 16 rows and bottom 16 rows. The panel only illuminates two rows at any time one from the top section and one from the bottom section. The entire process described below for outputting a single frame needs to be repeated at least 60 times per second, preferably 100-200 times per second to avoid flicker.
An overview of the basic steps needed to drive the panel is shown below.
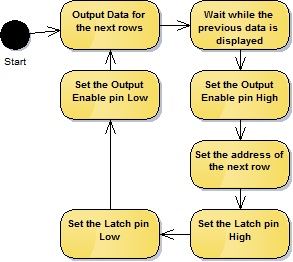
Data is output for two rows at the same time, data for the top sections row is output to the R1, G1, B1 pins and data for the bottom sections row is output to the R2, G2, B2 pins. The data is clocked into shift registers on the panel using the CLK pin.
The data is actually clocked into 6 different shift registers that all have their clock lines linked. The following pseudo C code shows how this is done.
unsigned char Red(unsigned char pixel) { return ((pixel >> 2) & 0x01); }
unsigned char Green(unsigned char pixel) { return ((pixel >> 1) & 0x01); }
unsigned char Blue(unsigned char pixel) { return ((pixel >> 0) & 0x01); }
void OutputRowData(unsigned char *topData, unsigned char *bottomData)
{
for(int column = 0; column < 32; ++column)
{
// Set the state of the LEDs for the pixel in
// the top half of the panel
R1_STATE = Red(topData[column]);
G1_STATE = Green(topData[column]);
B1_STATE = Blue(topData[column]);
// Set the state of the LEDs for the pixel in
// the bottom half of the panel
R2_STATE = Red(bottomData[column]);
G2_STATE = Green(bottomData[column]);
B2_STATE = Blue(bottomData[column]);
// Clock the pixels into the shift registers
CLK_STATE = 1;
Pause(); // Depending on the speed of you processor,
// this might not be needed
CLK_STATE = 0;
}
}
Wait for an amount of time, this time plus the time to output the data for the next row determines the on time for the LEDs on an individual row. The overall brightness of the display can be controlled by varying ratio of the LEDs on time and their off time.
This switches the LED outputs off (the Output Enable pin is active low). It’s best to turn the LED outputs off when changing rows to stop any undesired artifacts.
Setting the address requires setting the A, B, C and D pins. These work as a 4-bit row address so if they are all 0 the 1st and 16th rows will be illuminated.
The address determines which two rows of LEDs will be illuminated.
Toggling the LAT pin high then low will transfer the data clocked into the shift registers to the output pins of the shift register.
This switches the LED outputs back on.
Once rows 16 and 32 have been output start again at rows 1 and 17.
This process will only give you 3-bit pixel data so the possible colours are limited to Black, Red, Green, Blue, Cyan, Magenta, Yellow and White. It is possible to get the display to display more colours but I’ll save that for another blog post.
https://learn.adafruit.com/32×16-32×32-rgb-led-matrix/
http://bikerglen.com/projects/lighting/led-panel-1up/